
Page 22 - Master Magazine 6
P. 22
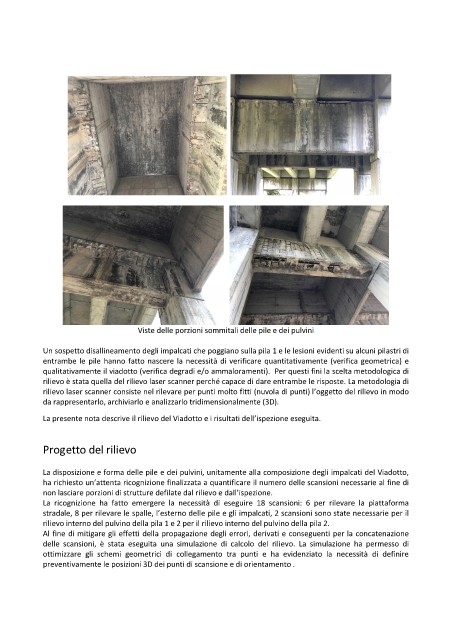
Viste delle porzioni sommitali delle pile e dei pulvini
Un sospetto disallineamento degli impalcati che poggiano sulla pila 1 e le lesioni evidenti su alcuni pilastri di
entrambe le pile hanno fatto nascere la necessità di verificare quantitativamente (verifica geometrica) e
qualitativamente il viadotto (verifica degradi e/o ammaloramenti). Per questi fini la scelta metodologica di
rilievo è stata quella del rilievo laser scanner perché capace di dare entrambe le risposte. La metodologia di
rilievo laser scanner consiste nel rilevare per punti molto fitti (nuvola di punti) l’oggetto del rilievo in modo
da rappresentarlo, archiviarlo e analizzarlo tridimensionalmente (3D).
La presente nota descrive il rilievo del Viadotto e i risultati dell’ispezione eseguita.
Progetto del rilievo
La disposizione e forma delle pile e dei pulvini, unitamente alla composizione degli impalcati del Viadotto,
ha richiesto un’attenta ricognizione finalizzata a quantificare il numero delle scansioni necessarie al fine di
non lasciare porzioni di strutture defilate dal rilievo e dall’ispezione.
La ricognizione ha fatto emergere la necessità di eseguire 18 scansioni: 6 per rilevare la piattaforma
stradale, 8 per rilevare le spalle, l’esterno delle pile e gli impalcati, 2 scansioni sono state necessarie per il
rilievo interno del pulvino della pila 1 e 2 per il rilievo interno del pulvino della pila 2.
Al fine di mitigare gli effetti della propagazione degli errori, derivati e conseguenti per la concatenazione
delle scansioni, è stata eseguita una simulazione di calcolo del rilievo. La simulazione ha permesso di
ottimizzare gli schemi geometrici di collegamento tra punti e ha evidenziato la necessità di definire
preventivamente le posizioni 3D dei punti di scansione e di orientamento .